


Caveman
-
Posts
799 -
Joined
-
Last visited
Content Type
Profiles
Forums
Blogs
Gallery
Calendar
Downloads
Posts posted by Caveman
-
-
Hi Geoff, when I subtly reshaped the nose of my Multiplex Funcub so that no longer had the strength or shape to be functional, I decided to replace it.
However, it was during the depths of the Covid epidemic and no-one had stock of a suitable replacement. So I decided to discard the fuselage completely and re-utilise all the electrics, the wings and tail and build a new fuselage from scratch.
I carefully measured the remains of the original fuselage and drew up a plan for its replacement.
As I had a large sheet of 3mm lite-ply in stock I used this for the sides and the bulkheads, balsa for the top and bottom sheeting and 6mm ply for the firewall.
Inevitably the finished fuselage is a little heavier than the old foam one, but the 'new' one flies just as well as the original.

It was well worth the effort and is a pleasure to fly - I think you're doing the right thing!
GDB
PS The wings have been through a few traumas as well - perhaps it's time to build some new ones 😁
-
This one caught my eye. I’ve got the 61 version of a similar vintage and it’s a really good engine.
Only a couple of hours to go until it’s finished though.
GDB
-
Hoochy, for my money, 40 to 46 two stroke or 52 to 61 four stroke would be ideal for the Sky 40.
Anything less would be under-powered, anything more would be over-powered.
I would, for simplicity and reasonably low cost, suggest a 46 two stroke would be ideal.
There are a few suitable engines on Ebay at the moment, both new and used. I would look at new and new (other) as there’s more chance the engine will be undamaged/badly worn.
GDB
-
Neddy, I think that you are in Australia. It would appear that piano wire is also known an Spring Wire and Music wire in Oz.
Have a look here - they sell 0.813mm dia. Spring Wire in 900mm lengths, which should be OK for your requirements.
Spring Wire (Size Table) (hobbyparts.com.au)
GDB
-
Neddy, your plane uses a pushrod system very similar to that used by Multiplex, i.e. a thin piano wire pushrod running in a plastic outer tube.
My Multiplex Easyglider uses a linkage stopper, as you describe, at the control horn end (with apologies for the poor photo) -
With a Z bend at the servo end -
The piano wire pushrod is 0.8mm diameter, inserted into a close fitting plastic tube that in turn runs in a larger diameter plastic tube - you should be able to see this in the above photo. A piano wire of SWG 20 (0.914mm dia. ) would fit into the smaller tube.
If you have retained the plastic tube then I would keep it simple and use a length of piano wire. Check what is the largest diameter which will fit with a good sliding fit in the tube and which will also fit into the linkage stopper, and use that with a Z bend at the servo.
SWG 21 is 0.814mm dia and would be a direct replacement for the original.
GDB
-
It's 3 channels, aileron, elevator and motor, or, 2 channels, aileron and elevator.
Pegasus Models also sell the same kits and list a suitable motor, ESC etc.
GDB
-
 1
1
-
-
How about the SLEC Coyote glider Coyote Glider 1320mm (52") span (slecuk.com) It can be built as a powered or non-powered version.
I haven't built a Coyote (but quite fancy one at some time), but I have built, flown and destroyed (mid-air collision) an SLEC Funfly. The quality of the kit, and the illustrated instructions, were excellent, and I can only assume that the Coyote kit is likewise.
There are also some build videos and blogs online if needed.
GDB
-
2
-
-
Ah! Good news Neddy. Have fun!
GDB
-
Neddy, I've been doing a bit more investigation. The nearest Art-Tech transmitter manual I can find is for the EFlyETB4 :
EFly ETB4 User-Manual-1006698.pdf
Is this very similar or the same as yours?
The manual mentions connecting the simulator port on your transmitter to the mic port on the computer exactly as you describe. It than goes on to give instructions for the setup of Windows, followed by the installation and running of the FMS Flight Simulator. See here FMS Homepage (modelsimulator.com)
Therefore it could be that your 'simulator port' is only compatible with this particular set-up - I really don't know - or it could be possible to connect it to Phoenix. There may be others on the forum that can advise you further.
At the end of the day you could download the FMS simulator (which is compatible with Windows 😎 and follow the instructions and get that running.
GDB
-
Hi Neddy, no, you don’t need the DVD.
I assume that you’ve downloaded the Phoenix files from RC-Thoughts.com and installed them following their instructions?
GDB
-
Neddy, I have exactly the same dongle as you, which works perfectly with Phoenix.
First thing, the sliding switch MUST be in the 4. Phoenix RC4 for the dongle to work with Phoenix.
I am running Phoenix on Windows 10, but previously ran it on Windows 7
Denis says that the transmitter should be switched off, but that is not necessarily the case - for my FrSky Taranis it needs to be switched ON in order to work with Phoenix.
I may be able to help if you, but I need to have a look at a couple of things tomorrow - I'll be back!
GDB
-
-
Toto, it looks to me like you have installed the undercarriage back to front. The spring carrier should be inline with the wheels, like the photos Steve has posted.
GDB
-
Nought wrong with your test stand Johnathan, snap!!
GDB
-
1
-
-
Colin, these are the nearest I can find. They're 700mAh and the size of the enclosure isn't given, but the shape is the same.
They are for a V17 'drone' which would appear to be the same type of thing as yours. Might be worth a punt?
GDB -
The download file is not a Windows installation file, it is a copy of a DVD.
To install it go to the RC-Thoughts website and download the Phoenix 5.5 installation file :-
then go further down the page and follow the link to the installation instructions :-
Follow the instructions and you will have a working copy of v5.5. Once it's up and running you can then upgrade to v6.0i
Are you aware that to run the simulator with your transmitter you need a dongle? If not let us know and we can point you in the right direction to get you up and running.
GDB
-
I've upgraded from version 5 to version 6i, all from here for nowt : Phoenix Simulator Downloads – RC-Thoughts.com
Version 6i includes the E-Flight Apprentice 15e and S15e. I don't know if they are the one you're looking for, but the S15e has SAFE technology.
GDB
-
1
-
-
Erfolg, look here on Outerzone at Mike Delacore’s Rival
https://outerzone.co.uk/plan_details.asp?ID=10431
The wing/tail incidence is zero.
GDB
-
1
-
-
Hi Rapide, I’ve looked at the 4Max website at the listing for the specified motor, and the the advice pages for wiring multiple brushless motors , and I can’t find anything which says that these motors will burn out if run at full throttle. Can you post a link to this information?
The only thing I can see is that the motor web page says that only GWS props should be used, whereas you listing shows APC props.
Thanks GDB
-
Yes Phil, that's the problem I think. The data taken from the GPS sensor and displayed on the screen (of my Taranis) is longitude W, latitude N, but when transferred to the log it's written as a decimal degrees, but the longitude should have a negative value for W, but it's logged with as a positive (E) value.
Hence I'm shown as being out in the North Sea!!
I can't find any way to resolve it.
GDB
-
Kevin, I had another go at this today.
On the sensors page of the Taranis the lat and long are read from the GPS sensor and displayed as xxxxN yyyyyW, which is correct for my location. But, when written to the log it is stored as xxxxx yyyyyy, the N & W being dropped, and therefore becomes xxxxx yyyyy which is N & E. Hence the the longitude is displayed by Google Earth as N & E and I'm shown as being in the North Sea. This under OpenTX 2.2.1
I previously under OpenTX 2.1 (?) the data was logged as xxxxxN yyyyyyW and all worked well, so I can only think that something has been altered in the OpenTX upgrade.
At the end of the day it really doesn't matter to me, all I have to do is amend the longitude to a negative value and it displays correctly.
It may be that if I upgraded to OpenTX 2.2.4 it may be that it's been fixed but I can't face the hassle of upgrading 🙂
GDB
-
 1
1
-
-
Hi Kevin, I've been delving a little deeper.
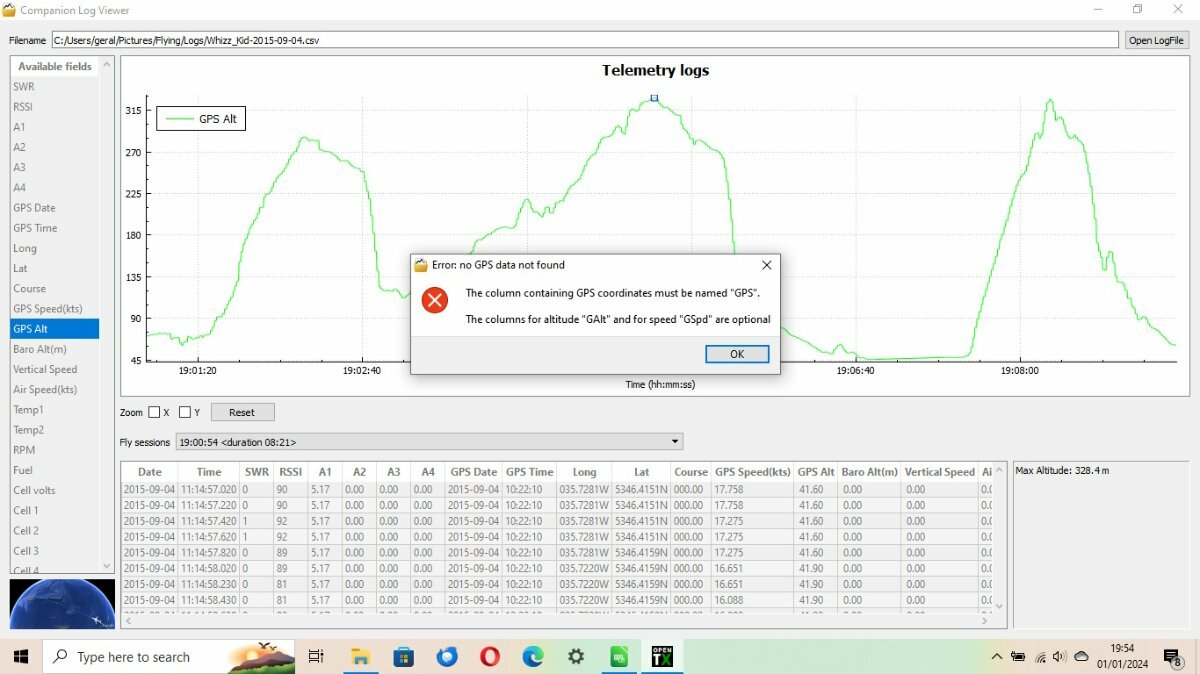
My oldest file Whizz Kid Sept 2015 has 2 columns labelled Lat & Long which Google Earth doesn't recognise. If I create a new column labelled GPS and place in it the lat and long info separated by a space then Google can recognise it and will display correctly. But, it doesn't appear to recognise the Alt data so doesn't display the flight path correctly. The Alt appears to be in metres and the Speed in knots.
None of the logs created before June 2016 will work - they did originally.
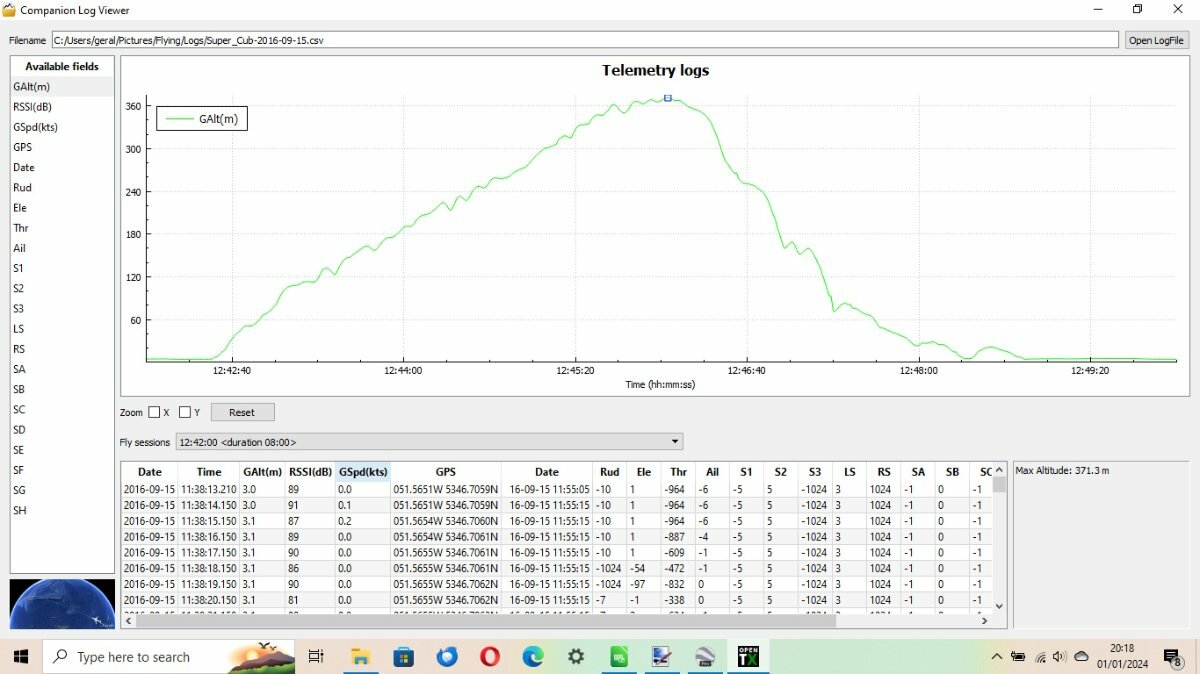
I must have updated my OpenTx version sometime in early 2016 because all files from June 2016 to December 2017 now display correctly, as this one. However from September 2016 the altitude changed to ft and speed to mph - I must have changed something!
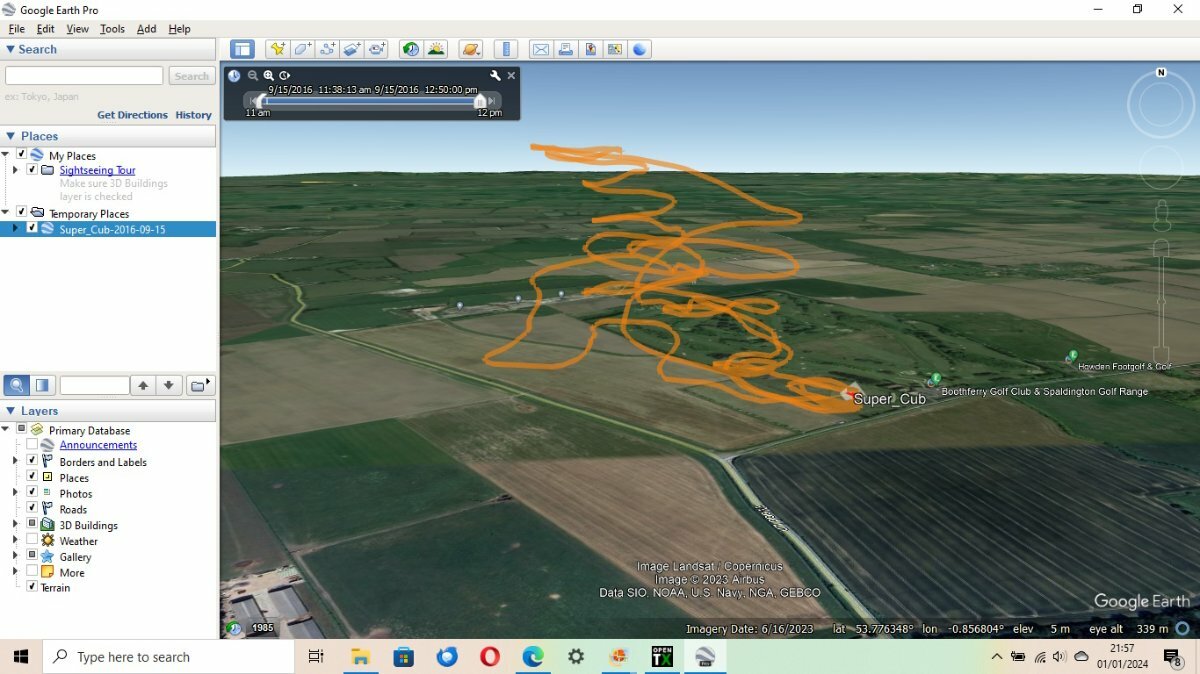
Note the format of the lat and long. Longitude annotated W and latitude N
The same flight in Google Earth
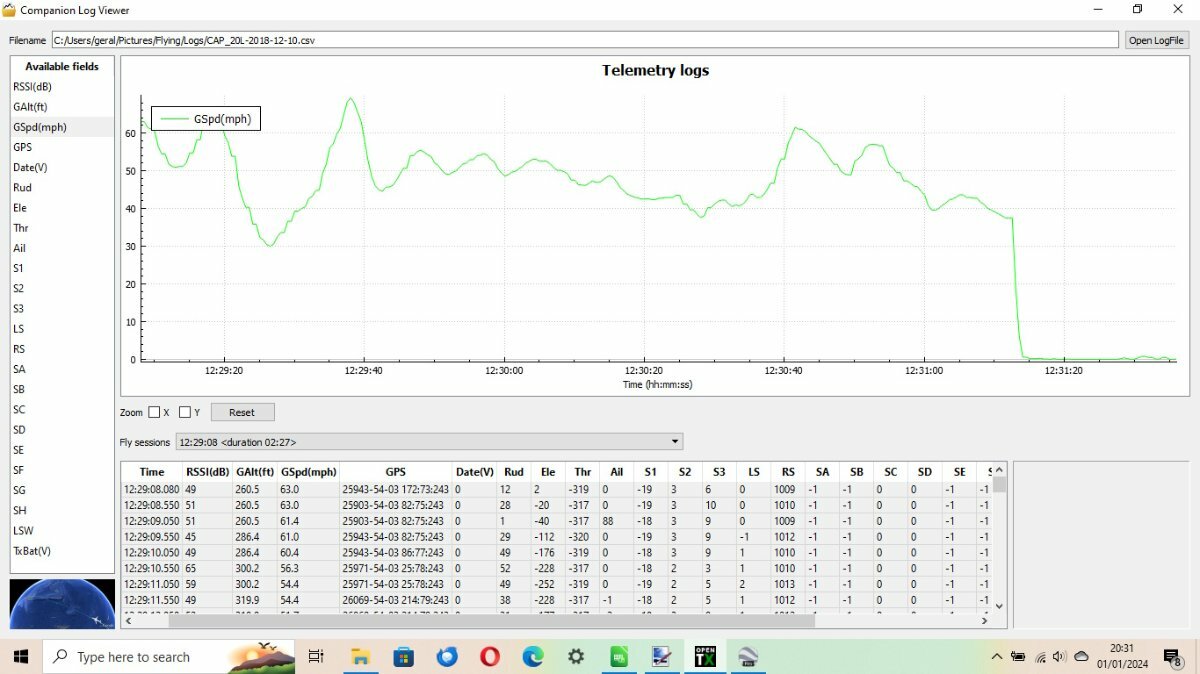
I didn't use the GPS again until December 2018. The log file appears to be corrupted. See the next photo. The GPS and date fields seem to have been mixed together somehow. Although the Alt and Speed etc are OK it's no good for Google!
GPS then not used until my test last evening where everything works OK, except that the longitude is incorrect as reported above. Also the alt is now in metres and speed in knots again. I think I must have again updated my tx between December 2017 and December 2023. Also a new column has appeared in the log file labelled 'F010' - I've no idea what it is!!
Note this a static test, the GPS was sitting on my window sill - variation in altitude must be down to signal quality, or lack of it 🙂
NB This is the altered log to change the longitude from E to W be inserting a minus sign.
Any suggestions?
GDB
-
I have an FrSky GPS sensor V2 which I used a fair amount in the mid 2010s. I can't remember when it, or what, went wrong, but following an OpenTX update it would no longer link to Google Earth and the format of the data recorded in the SD log file was garbled. Therefore I haven't used it recently.
However, having read the thread above I decided to have a play with it this evening. I connected it to a receiver, waited until the red led changed from quick flashing to slow flashing - indicating a satisfactory GPS position was fixed - and recorded a 4 minute log.
I copied the log file onto my computer and accessed it with OpenTx Companion. Much to my surprise it opened Google Earth, read the data and opened a display of the recorded position.
That's when things didn't go so well! I was indicated to be somewhere in/on the North Sea - not so good. However, the latitude was correct, but the longitude was not. The problem is that I live around 0.5 deg. west of the Greenwich meridian and Google Earth takes 0.5 as being East.
The answer in the short term, in order to display the correct position, is to change the longitude data to read -0.5 deg. then all is well. I did this using a spreadsheet, but it's not a quick and simple task. However it does at least show that it works, more or less. The problem is that if you fly across the meridian then this won't work.
There may be a simple configuration, either in OpenTX or in Google Earth, which would fix this, but I don't know.
GDB
-






Turnigy I 10 transmitter power
in All Things Model Flying
Posted
Google FS-B1700 battery, there are lots available, mostly from China. They seem to be 1600 mAh, but that shouldn’t be a problem.
GDB